CP180L機器人的規格
| CP180L的規格 |
| 手臂類型 |
多關節型機器人 |
| 自由度 (軸) |
4 |
| *大負載能力 (kg) |
180 |
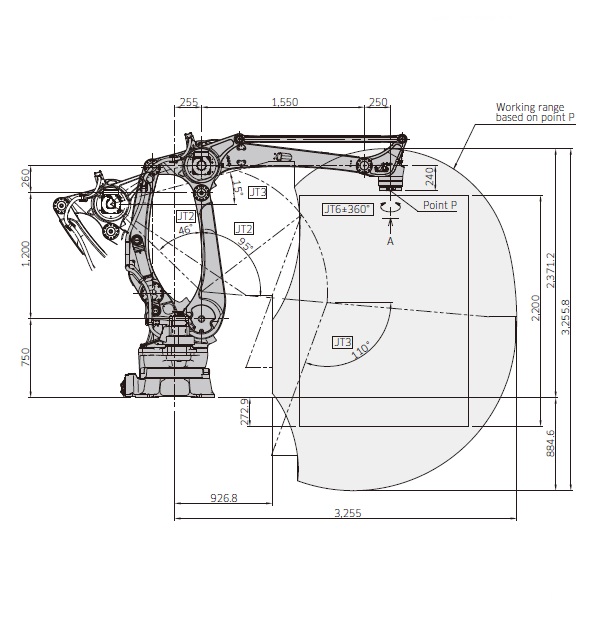
| *大臂展 (mm) |
3,255 |
| 重復定位精度 (mm) 1 |
±0.5 |
| 動作范圍 (°) |
手臂旋轉 (JT1) |
±160 |
| 手臂前后 (JT2) |
+95 - -46 |
| 手臂上下 (JT3) |
+15 - -110 |
| 手腕旋轉 (JT4) |
±360 |
| *大速度 (°/s) |
手臂旋轉 (JT1) |
140 2 |
| 手臂前后 (JT2) |
125 2 |
| 手臂上下 (JT3) |
130 2 |
| 手腕旋轉 (JT4) |
400 2 |
| 允許負載慣量 (kg•m2) |
50 2 |
| 處理能力 (次/時) 3 |
2,050 2 |
| 重量 (kg) |
1,600 |
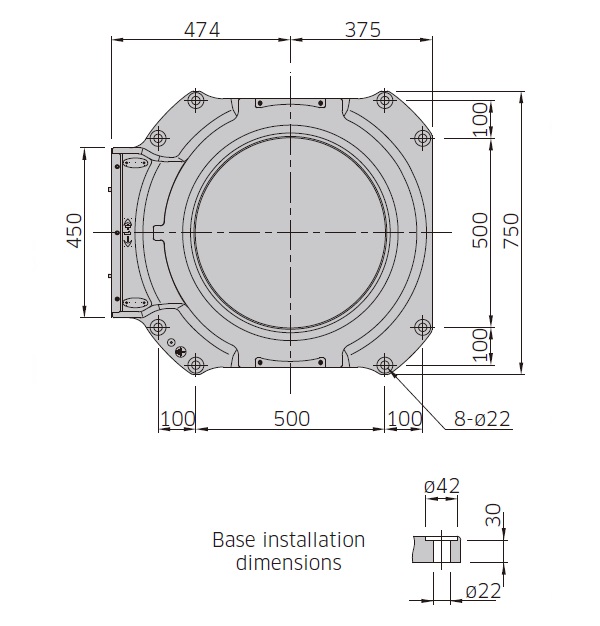
| 安裝方式 |
地面 |
| 安裝條件 |
環境溫度 (°C) |
0 - 45 |
| 相對濕度 (%) |
35 - 85 (無結露) |
| 控制柜 / 所需電源 |
E03 / 12 |
1: 以ISO9283為基準。
2: 如果負載小于等于130kg。
3: 動作方式(上升400mm, 水平運動2,000mm,下降400mm的往復運動)
更多川崎機器人資訊請點擊:http://www.kawasakirobotic.gongboshi.com/


 在線客服
在線客服
 企業微信
企業微信








 [VIP第5年] 指數:1
[VIP第5年] 指數:1 通過認證
通過認證